| EPFL > BIG > Teaching > Student Projects > Completed Projects > Loïc Perruchoudc |
| CONTENTS |
|
Student Projects |
Loïc Perruchoudc | Semester Project |
Section of Mathematics, EPFL | January 2013 |
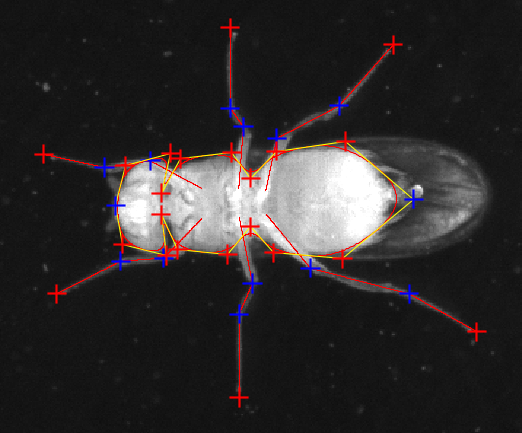
In order to study locomotion in Drosophila, one must be able to quantify with high precision their walking behaviours.
Therefore, the goal of this project is to build a computer vision software that extracts information on the positions
and orientations of various leg segments from video input of Drosophila in an automated way.
This work was separated into two major parts.
The first part reported the tracking of the body of a
fly. This task was completed using an active snake. We first introduce the basics of active snakes and presented how the
evolution of the curve define by the snake can be formulated as an optimization problem.
Then, we introduced various fly models that we used. We finally showed how it is possible
to track the body of a fly using active snake with a shape regularization energy term. The
tracking algorithm showed good performances and robustness.
In the second part, we have been able to extend the optimization procedure
used to track the body to the legs. We defined a parametric model of legs that can be
attached to the body as a function of the active snake tracking the body. The tracking
problem was formulated as an optimization problem thanks to an energy term based on
the response of the fly to a steerable ridge filter. We showed that by adding two geometric
constraint energy terms, we were able to obtain promising results for the tracking of the
legs of the fly.
© 2022 EPFL • webmaster.big@epfl.ch • 11.08.2022