DMT IOA
22 february 2002
Micaël Rochat, Microengineering
Assistant : Gaëtan Marti
Professor : Michael Unser


|
||||||||||||||||||
|
|
||||||||||||||||||
|
DMT IOA
|
|
22 february 2002
|
||||||||||||||||
|
Micaël Rochat, Microengineering Assistant : Gaëtan Marti Professor : Michael Unser |
||||||||||||||||||
|
|
||||||||||||||||||
|
||||||||||||||||||
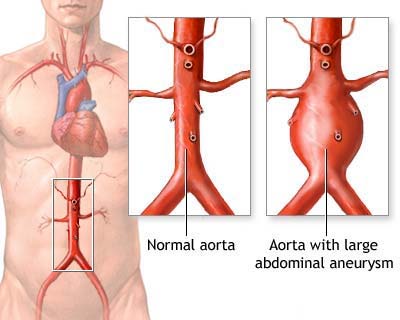
| Minimal invasive surgery of the abdominal aortic aneurysm (cf. Figure 1) requires, from the doctor, 3D representation skills to determine organ's position and to locate the aneurysm. | ||||||||||||||||||
| Figure 1 Abdominal aortic aneurysm | ||||||||||||||||||
| We make a rigid registration by executing an algorithm which requires the minimal knowledge of four points on the 3D model and on the XA synthetic view (cf Figure 2). | ||||||||||||||||||
|
||||||||||||||||||
| Figure 2 3D Model Rigid Registration | ||||||||||||||||||
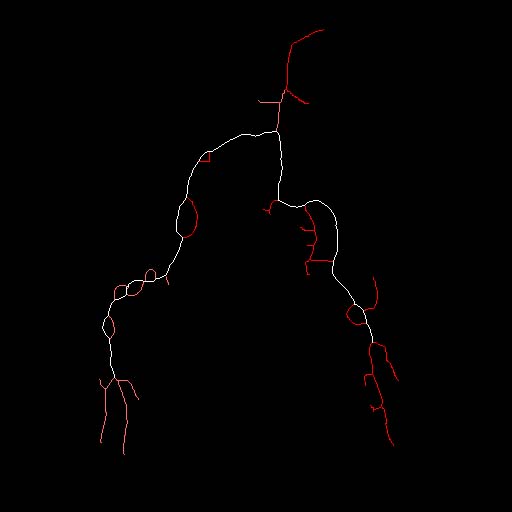
| The result isn't good enough, because we have to take care about configuration differences of the aorta between the moment of the CT and the moment of the X-Ray angiographs. So we need a non rigid registration which will be done between 3D and XA skeletons. We have developped a skeleton extractor algorithm; Comparing with the 3D skeleton of the aorta model after the rigid registration we are able to find the path of the 2D skeleton which fit the best the 3D skeleton (cf. Figure 3 & 4) | ||||||||||||||||||
|
|
|||||||||||||||||
| Figure 3 3D skeleton position after Rigid Registration | Figure 4 Best Path of the 2D skeleton after comparison with the 3D registered skeleton | |||||||||||||||||
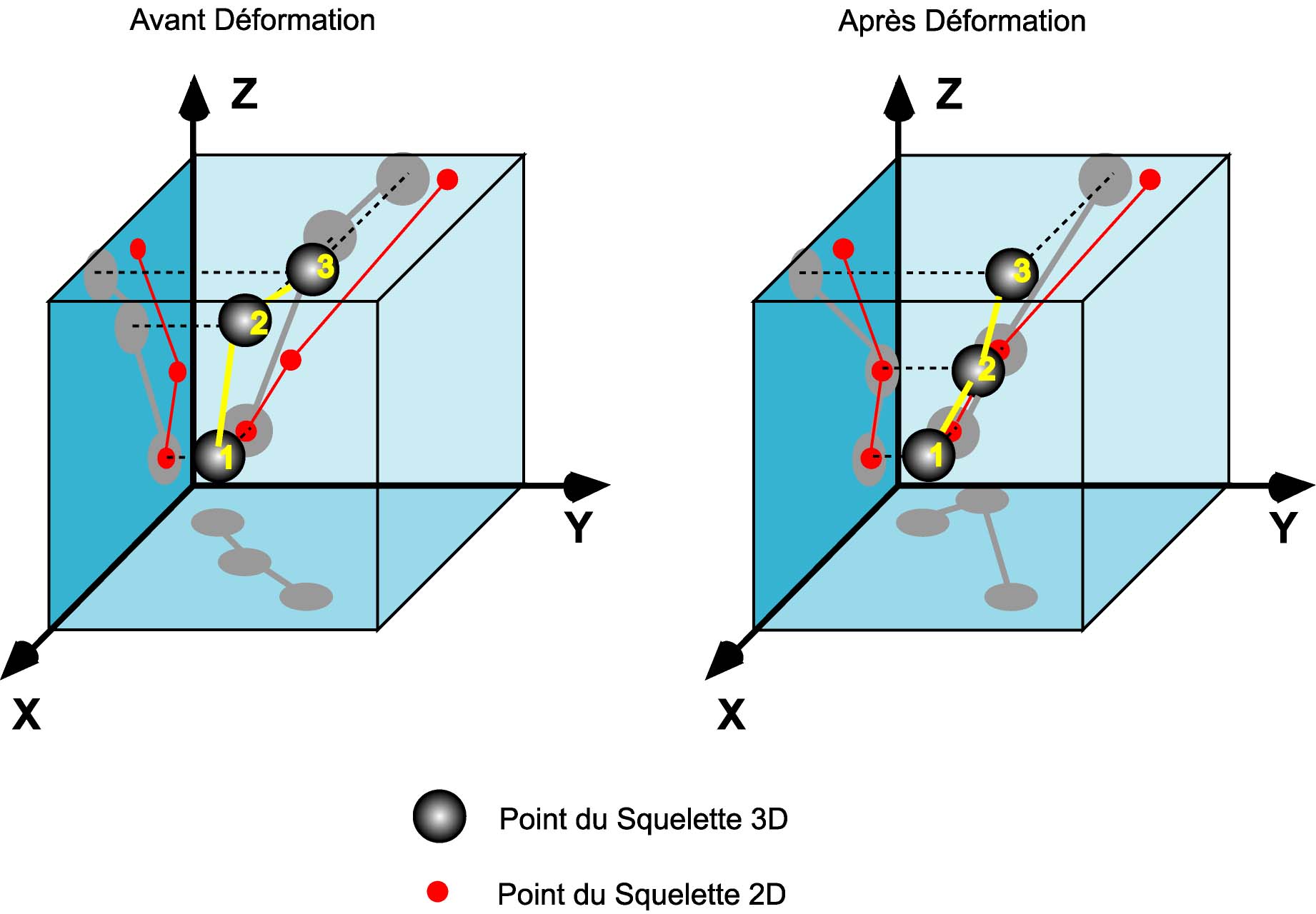
| We calculate non rigid registration between XA and CT skeletons with the help of an elongation and compression model for the distance between points.Deformation is consecutively applied for each projection plan to obtain the best overlay between 3D points and 2D points (cf. Figure 5). | ||||||||||||||||||
|
||||||||||||||||||
| Figure 5 3D skeleton points with projectiv deformation | ||||||||||||||||||
| Now we have the 3D skeleton registered, we should add the 3D mesh. | ||||||||||||||||||