|
A panoramic camera is composed of a camera and a catadioptric system,
i.e., a system of lenses and mirrors. Such a system allows enhancing the
field of view while preserving a single viewpoint.
The acquired images are deformed and hence one needs to unwarp them.
To unwarp, we need to know the parameters of the system. These are recovered
through a calibration process. Usually, the calibration is done manually
using the external circle of the image and corresponding values provided
by the manufacturer.
This project consists of automatically calibrating a panoramic camera
that uses a parabolic mirror, employing the contents of the acquired image.

Set up of the camera
The proposed calibration method uses the properties of the
projection of straight lines in real world onto the image plane. These
straight lines are projected onto circles, if they are not vertical and
onto straight lines pointing to the focus, if they are vertical. The properties
of these straight lines and circles allow determining the parameters of
the paracatadioptric system.
The first part of this work is the algorithm for detecting
the parameters. This algorithm first detects the contours via an edge
detection and a robust post processing, and fits circles and straight
lines on these contours. From these circles and straight lines, the required
parameters are detected.
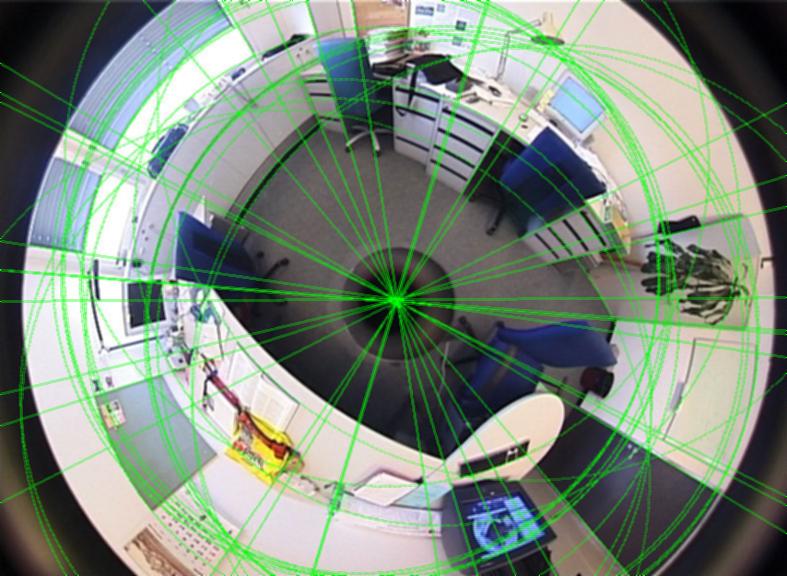
Graphical result of the calibration
The second part consists of recovering the perspective image
from the acquired image. An interface is provided that allows to specify
the perspective image. This is done through a Java application.

Perspective image reconstructed
|
