 A team of the Swiss institute for experimental cancer research (ISREC) search to quantify the synaptic activity that are able to influence the morphological development of neurons. For this, the researchers have developed a experimental model in vitro and perform some morphological studies based on confocal images. A team of the Swiss institute for experimental cancer research (ISREC) search to quantify the synaptic activity that are able to influence the morphological development of neurons. For this, the researchers have developed a experimental model in vitro and perform some morphological studies based on confocal images.
The easiest way to observe differences between treated and non- treated neurons is to:
- measure the dendrites length
- to detect the dendrite-bifurcation
- measure the angle between the parting branches
This semester project has as goal to compute and evaluate all of these information. At present, all this information are extracted manually in a tedious and time consuming fashion. The goal is to automate the extraction of information and to write a java plugin for ImageJ, a image handling software, which is able to measure the length of the axon and the dendrites, to detect dendrite-separations and to measure the angel between the branches. Finally all the information is put into an output file.
| 
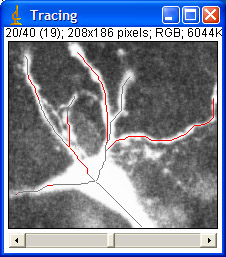
 The algorithm that we have implemented for dendrite detection is inspired form dynamic programming and the algorithm used for live-wire applications. The goal is to find the optimal path between a start node/pixel and a set of goal nodes/pixels. The optimal path is defined as the minimum cumulative cost path from a start node to the goal node. The cumulative cost of a path is the sum of the local cost on the path. This approach allows three degrees of freedom in the search.
The algorithm that we have implemented for dendrite detection is inspired form dynamic programming and the algorithm used for live-wire applications. The goal is to find the optimal path between a start node/pixel and a set of goal nodes/pixels. The optimal path is defined as the minimum cumulative cost path from a start node to the goal node. The cumulative cost of a path is the sum of the local cost on the path. This approach allows three degrees of freedom in the search.
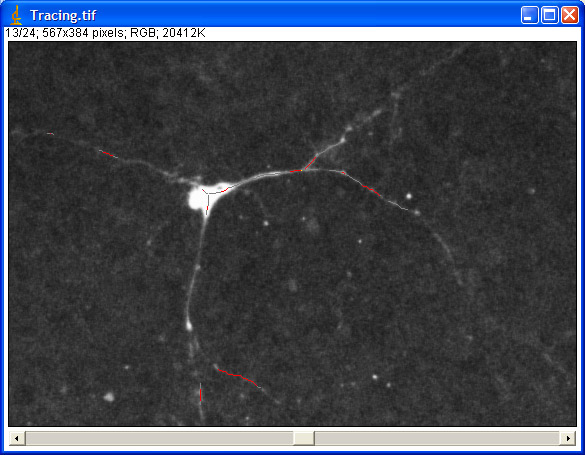
 Based on 3D image stacks of a biological environment, the goal was to automate the processes of: measuring the dendrites length, detecting the dendrite-bifurcation and measuring the angle between the parting branches out of image stacks. All this tasks have been realized by the implemented graph searching algorithm which is a computation of minimum cumulative cost paths from a start node to a goal node.
Based on 3D image stacks of a biological environment, the goal was to automate the processes of: measuring the dendrites length, detecting the dendrite-bifurcation and measuring the angle between the parting branches out of image stacks. All this tasks have been realized by the implemented graph searching algorithm which is a computation of minimum cumulative cost paths from a start node to a goal node.