|
Some methods were proposed to improve the quality of the edge detection. For example, interpolating the image was mentioned, but, because the interpolation
has to be quite precise, the computation time is often high. Other very efficient methods were proposed with an improvement of the non-maxima suppression
stage specifically, but with the loss of the simple image representation, which makes a post-processing difficult.
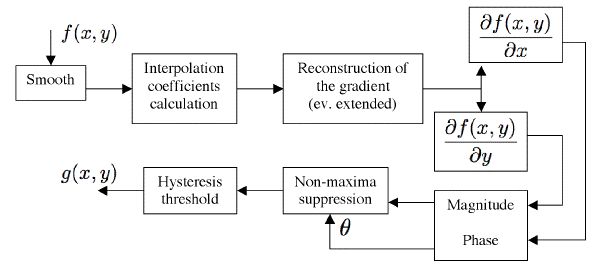
In this project, we used cubic B-splines, which provide a very efficient way for interpolation, by a recursive implementation in spatial domain. With this
method, it is possible to solve partly the problem of computation time. This method was integrated in the Canny edge detector, especially adapted to the continuous
representation of the image. |